1. 贡献者列表
DJYOS开发团队。
2. 概述
DJYOS的DjyBus总线模型为IIC、SPI之类的器件提供统一的访问接口,SPIBUS模块是DjyBus模块的一个子模块,为SPI器件提供统一的编程接口,实现通信协议层与器件层的分离。也标准化了SPI总线和 Device驱动接口,本手册指导驱动工程师编写SPI的接口程序。
SPI总线使用手册,请参见《都江堰操作系统用户手册》。
局限性:DJYOSV1.1.1版本的SPI驱动只提供主设备功能。
3. 总线资源结构
SPI通信协议是一种总线通信方式,这意味着一条总线上可以挂多个符合总线通信协议的设备,DjyBus资源组织结构就是符合这样一种物理的连接方式。如图 2‑1所示资源组织结构图,总线类型 “SPI”、第n条总线“SPIn”、第n条总线上面的设备“Devn”,它们都是DjyBus资源树上面的资源节点,每次向总线“SPIn”上面增加一个设备,便向资源树上面增加了一个资源节点,它是“SPIn”的子节点。

图 2‑1 总线资源结构
4. 准备工作
在编写SPI 器件驱动前,建议完成必要的准备工作,如:
1、 认真阅读器件手册,了解通信协议、参数、操作流程等内容;
2、 熟悉spibus.h头文件中提供的API,懂得参数的使用方法;
3、 阅读SPI总线协议文档,熟练掌握SPI总线。
5.SPI 总线驱动接口
5.1. 驱动架构
SPIBus是DjyBus模块的一个子模块,其结构如图 4‑1所示,它为SPI器件提供标准的、一致的应用程序编程接口,并且规范了硬件驱动接口。驱动接口分为总线控制器接口和SPI器件接口两部分,驱动的重点是总线控制器,而器件接口实际上就是配置一下该器件的物理参数。
建议文件路径:在eclipse工程中的链接目录如下,如果是导入官方提供的example工程,那么该目录已经建立,在硬盘中添加文件后,只需要刷新工程即会自动添加进工程中。
src->OS_code->bsp->cpudrv->src->cpu_peri_spi.c。
相应的头文件目录为:
src->OS_code->bsp->cpudrv-> src->cpu_peri_spi.h。
在文件系统(硬盘)中的目录结构是:
djysrc\bsp\cpudrv\cpu_name\src\cpu_peri_spi.c。
djysrc\bsp\cpudrv\cpu_name\include\cpu_peri_spi.h。
根据以上命名,可以在DJYOS官方提供的代码中,找到大量范例。
以上文件命名并非绝对,例如LPC17xx的SPI模块,硬件被官方命名为SSP模块,DJYOS提供的源码中,其文件名就命名为cpu_peri_ssp.c。
SPI驱动程序编写重点有:
1、 初始化SPI控制器,并且把SPI总线添加到DjyBus上。
2、 实现图 4‑1中的5个回调函数(哪些需要实现,参考后续章节)。
3、 如果采用中断方式,须编写中断服务函数(实际上也是为4个回调函数服务)
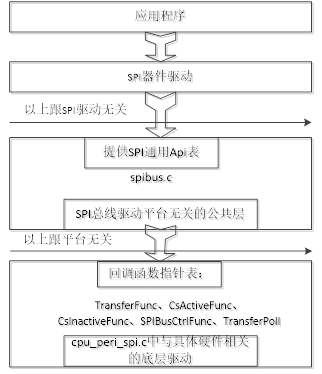
图 4‑1 SPIBus总线驱动架构
5.2. 初始化函数
5.2.1. Step1:初始化硬件
1、 SPI控制器硬件的初始化,包括传输速度、IO配置、时钟等;
2、 挂载SPI中断到中断系统,并配置中断类型,如配置为异步信号(若只采用轮询方式,则此功能可省略);
5.2.2. Step2:初始化参数结构体
添加SPI总线的参数类型为struct tagSPI_Param,由函数SPI_BusAdd或SPI_BusAdd_s完成对SPI总线控制块的初始化和添加SPIn总线节点到DjyBus资源树。
代码 4‑1 SPI参数结构体定义
|
struct tagSPI_Param { char *BusName; //总线名称,如SPI1 u8 *SPIBuf; //总线缓冲区指针 u32 SPIBufLen; //总线缓冲区大小,字节 ptu32_t SpecificFlag; //SPI私有标签,如控制寄存器基址 bool_t MultiCSRegFlag; //SPI控制寄存器是否有多套CS配置寄存器 TransferFunc pTransferTxRx; //发送接收回调函数,中断方式 TransferPoll pTransferPoll; //发送接收回调函数,轮询方式 CsActiveFunc pCsActive; //片选使能 CsInActiveFunc pCsInActive; //片选失能 SPIBusCtrlFunc pBusCtrl; //控制函数 }; |
SPI主设备同一时刻只能与一个从设备通信,收发同时进行,因此同一个SPI控制器中,多个片选可以共用缓冲区。
很多的SPI控制器对每个片选都提供一套配置通信参数寄存器,例如,CS0与从设备通信采用速度5Mbit/s,字符宽度为8比特,MSB,对应的配置片选CS0对应的寄存器,而CS1的从设备采用速度10Mbit/s,字符宽度为16比特,LSB,对应的配置片选CS1对应的寄存器。这种增强型的控制器对于一主多从,参数不一的通信能大大提高通信效率,简化参数配置。
SPI参数结构体的回调函数参数的原型如代码 4‑2所示,其中PrivateTag就是结构体中SPI的私有标签,即SPIn寄存器基址。
代码 4‑2 SPI回调函数类型申明
|
typedef ptu32_t (*TransferFunc)(ptu32_t SpecificFlag,u32 sendlen,u32 recvlen,u32 recvoff); typedef bool_t (*TransferPoll)(ptu32_t SpecificFlag,u8* srcaddr,u32 sendlen,u8* destaddr,u32 recvlen,u32 recvoff); typedef bool_t (*CsActiveFunc)(ptu32_t SpecificFlag, u8 cs); typedef bool_t (*CsInActiveFunc)(ptu32_t SpecificFlag, u8 cs); typedef ptu32_t (*SPIBusCtrlFunc)(ptu32_t SpecificFlag,u32 cmd,ptu32_t data1,ptu32_t data2); |
5.2.3. Step3:挂载总线
有多少SPI总线是由具体的平台决定,因此,增加SPI总线到DjyBus上是由总线驱动程序员完成,成功添加的“SPIn”节点会成为“SPI”节点的子节点。
增加SPI总线的API函数可以调用SPI_BusAdd函数或SPI_BusAdd_s函数,两者的区别在于,SPI_BusAdd只需调用者提供已初始化好的参数结构体struct tagSPI_Param,而后者更需要提供struct tagSPI_CB结构体控制块(建议定义为静态变量)。
5.3. 回调函数
5.3.1. 轮询函数
如果采用轮询方式收发,5个回调函数中只需要实现这一个,其他指针置为NULL即可。
轮询函数使用场合:
1、 收发方式被设为轮询方式,则总是用轮询函数收发数据。默认值为中断方式,可调用SPI_BusCtrl函数设为轮询方式。
2、 在禁止调度(即禁止异步信号中断)期间,强制使用轮询方式。
3、 pTransferTxRx ==NULL,则使用轮询方式收发。
4、 系统初始化未完成,多事件调度尚未启动期间。
如果使用中断方式收发,且不考虑在2~4三种情况下收发数据,则无须实现本函数,pTransferPoll指针设为NULL即可。
回调函数说明如下:
typedef bool_t (*TransferPoll)(ptu32_t SpecificFlag,u8* srcaddr,u32 sendlen,
u8* destaddr,u32 recvlen,u32 recvoff);
参数:
SpecificFlag:寄存器基址
srcaddr:发送数据存储地址。
sendlen:发送数据字节数。
destaddr:接收数据存储地址。
recvlen:接收数据字节数。
recvoff:接收偏移字节数,即认为接收到recvoff字节后的数据为有效,才存储。
返回:true,执行成功;false,执行失败。
说明:轮询方式主要应用于系统调度未启动或对实时性要求不高的场合,这种方法能够简化编程处理,快速实现通信功能。
5.3.2. 启动收发
启动收发是在使用中断方式收发数据必须实现的回调函数,若使用轮询方式,无须实现本函数,本函数指针设置为NULL即可。
回调函数说明如下:
typedef ptu32_t (*TransferFunc)(ptu32_t SpecificFlag,u32 sendlen,
u32 recvlen,u32 recvoff);
参数:
SpecificFlag,寄存器基址。
sendlen,发送数据长度,字节单位。
recvlen,接收数据长度,字节单位。
recvoff,接收偏移,接收到多少个字节后开始保护数据,即有用数据。
返回:true,中断方式启动通信成功,false,失败。
说明:该函数功能是配置SPI寄存器,并保存有关参数,使能中断,SPI总线采用的是四线的收发方式,收、发、时钟和片选。TransferFunc实质上是实现了相关的寄存器的配置,并中断使能。当然,SPI总线协议规定,操作设备前必须把对应从设备的CS线拉低。
对于TransferFunc需要完成的功能作如下说明:
1、 保存静态变量,如发送接收数据长度,接收偏移(从接收到的第几个数据开始保存数据);
2、 配置SPI寄存器,使其处于发送和接收的状态;
3、 配置中断使能,并触发中断,在中断中将数据发送接收完成。
5.3.3. 片选使能
若使用轮询方式,本函数指针设置为NULL即可,但使能片选的功能须实现。
typedef bool_t (*CsActiveFunc)(ptu32_t SpecificFlag, u8 cs);
功能:片选拉低
参数:
SpecificFlag,寄存器基址
cs,片选号
返回:是否成功
虽然对于具体的芯片,该函数的实现过程不相同,但是功能是相同的,即拉低片选,选择CS对应的SPI从器件通信。若控制器具有硬件自动片选,硬件驱动可加以利用,提高效率。
5.3.4. 片选失能
若使用轮询方式,本函数指针设置为NULL即可,但失能片选的功能须实现。
typedef bool_t (*CsInActiveFunc)(ptu32_t SpecificFlag, u8 cs);
功能:片选拉高
参数:
SpecificFlag,寄存器基址
cs,片选号
返回:是否成功
5.3.5. 控制函数
目前,控制函数主要实现对总线的配置,如自动片选、传输速度、SPI时序配置等。应用层将通过调用SPI_Ctrl接口函数,传递不同的命令和参数,实现对总线的控制。
如果SPI控制器针对每个片选信号都有独立的配置寄存器,则在添加设备时(SPI_DevAddr),配置好每个片选寄存器;若多个片选共用一套配置寄存器,则每次传输都必须重新配置。在结构体SPI_CB中,成员multi_cs_reg是用来标记SPI控制器是否具有多套片选寄存器,在调用ModuleInstall_SPI时,硬件驱动会作相应的标记。
从SPI协议的时序来讲配置参数会更加的清晰。如图 4‑2和图 4‑3所示,SPI通信首先需产生CS片选有效,即拉低对应的CS片选。时钟信号SPI_CLK在未通信状态时的电平状态由CHOL决定,为高或者为低。而CPHA决定时序的相位,当CPHA为0时,在SPI_CLK的第一个边沿采样,第二个边沿输出数据;当CPHA为1时,在SPI_CLK的第一个边沿输出数据,第二个边沿采样。
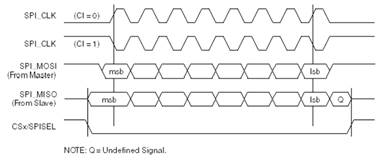
图 4‑2 SPI时序CPHA=0
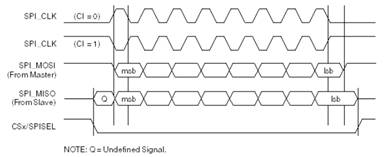
图 4‑3 SPI时序CPHA=1
CHOL和CPHA两种配置组成了四种模式,分别为模式0、1、2、3,如表 4‑1所示,部分SPI从器件只支持部分模式,需根据具体器件配置成要求的模式。
表 4‑1 SPI模式
|
CHOL |
CPHA |
MODE |
|
0 |
0 |
0 |
|
0 |
1 |
1 |
|
1 |
0 |
2 |
|
1 |
1 |
3 |
控制命令用于应用层调用spibus.h的API的控制函数SPI_Ctrl实现参数配置或通信设置,与硬件相关的命令一览表如表 4‑2所示。
表 4‑2 SPI命令表
|
命令 |
参数1 |
参数2 |
说明 |
|
CN_SPI_SET_CLK |
速率,bit/s |
无意义 |
设置传输速度 |
|
CN_SPI_CS_CONFIG |
tagSpiConfig |
无意义 |
配置相关参数 |
|
CN_SPI_SET_AUTO_CS_EN |
无意义 |
无意义 |
自动片选使能 |
|
CN_SPI_SET_AUTO_CS_DIS |
无意义 |
无意义 |
自动片选失能 |
5.4. 中断服务函数
5.4.1. 功能描述
如果使用轮询方式实现驱动,则无须编写中断服务函数。
SPI接收和发送使用中断方式的好处在于,将发送任务由SPI控制器完成,节省CPU的处理负荷,因此提高了程序的运行效率,缺点在于编程相对复杂。现在绝大多数的主流CPU的中断系统都支持SPI中断,包括发送接收中断等。
SPI模块要求在中断服务函数内部完成的功能有如下:
1、 清中断标志,处理好接收与发送数据同时进行的硬件机制;
2、 接收数据从接收到recvoff字符数据后开始存储,即调用SPI_PortWrite;
3、 发送数据从SPI_PortRead读取,若没有读到数据,则代表数据已经发送完成;若此时接收的数据还未完成,应该继续往寄存器中写数据,直到接收完成;
4、 数据传输完成时,配置相应的寄存器,使其处于初始状态(视控制器而定);
5.4.2. 中断实现过程
下面以Atmel芯片为例,通过流程图的方式简要说明SPI中断服务函数的数据处理流程图。值得注意的是,中断服务函数中有些变量是通过__SPI_TransferTxRx传递参数到底层硬件驱动,底层驱动通过静态变量存储,并在中断服务函数中使用。如发送接收数据大小,信号量等。
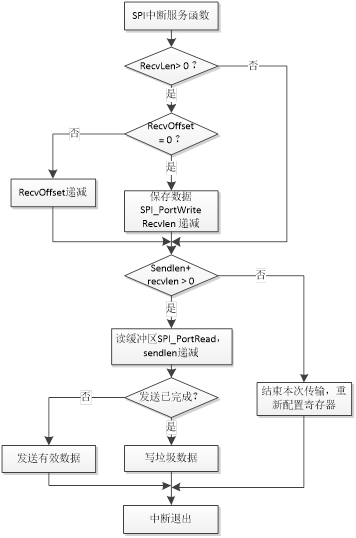
图 4‑4 中断服务函数流程图
5.5. 移植建议
为了简化编程,提高工作效率, BSP程序人员可采取下面的步骤快速的完成DJYOS驱动架构下SPI底层驱动的开发。
1、 拷贝其他工程已测试通过的SPI驱动文件cpu_peri_spi.c/cpu_peri_spi.h;
2、 添加SPI的中断号到critical.c文件下面tg_IntUsed数组;
3、 修改cpu_peri_spi.c/cpu_peri_spi.h中与具体SPI寄存器相关的部分;
4、 回调函数的具体实现和中断收发数据。
调用器件驱动程序前,确保已经调用ModuleInstall_DjyBus和ModuleInstall_SPIBus安装DjyBus和SPIBus模块。
6. SPI器件驱动接口
建议将器件驱动的存放目录为djysrc\bsp\chip\xxx,其中,xxx是具体芯片的文件夹名称。
SPI总线初始化完成后,添加一个器件到总线上的过程,非常简单,就是初始化一下该器件的寻址特性参数,然后调用SPI_DevAdd_s或SPI_DevAdd函数把器件添加到总线上即可。需配置的参数,都在spibus.h文件中定义的struct tagSPI_Device中描述。struct tagSPI_Device结构定义如下:
代码 5‑1 SPI器件结构体
|
//SPI总线器件结构体 struct tagSPI_Device { struct tagRscNode DevNode; u8 Cs; //片选信号 bool_t AutoCs; //自动片选 u8 CharLen; //数据长度 u8 Mode; //模式选择 u8 ShiftDir; //MSB or LSB u32 Freq; //速度,Hz }; |
6.1. 初始化过程
添加器件到总线的过程就是将器件节点挂到相应的“SPIn”总线节点的过程,同时,配置好相应的总线通信参数。现对添加SPI器件要点作如下说明:
1、 若使用SPI_DevAdd_s挂载器件,定义static struct tagSPI_Device类型的静态变量;
2、 若使用SPI_DevAdd_s挂载器件,初始化数据struct tagSPI_Param的各成员;
3、 调用SPI_DevAdd_s或SPI_DevAdd添加设备到总线节点。
4、 调用SPI_BusCtrl设置总线参数
SPI_DevAdd_s或SPI_DevAdd都可以把器件添加到总线上,但两者是有区别的:
1、 使用SPI_DevAdd_s的话,你需要自己准备struct tagSPI_Device结构,并且自行初始化,特别是,当操作系统的spibus模块被修改导致该结构的定义发生变化时,器件驱动程序也需要修改。
2、 使用SPI_DevAdd_s的好处是,该结构无须动态分配,符合像OSEK之类的严谨规范。
3、 使用SPI_DevAdd的好处是,驱动程序非常简单。
下面用ATMEL公司的AT45的EEPROM芯片为例说明添加设备过程。如代码 5‑2所示,将AT45芯片添加到总线“SPI”,并命名为“SPI_Dev_AT45”。
代码 5‑2 添加SPI设备实例
|
bool_t AT45_HardInit(void) { bool_t result = false; if(s_AT45_InitFlag == true) return true; static struct tagSPI_Device s_AT45_Dev;
s_AT45_Dev.AutoCs = false; s_AT45_Dev.CharLen = 8; s_AT45_Dev.Cs = CN_AT45_SPI_CS; s_AT45_Dev.Freq = CN_AT45_SPI_FRE; s_AT45_Dev.Mode = SPI_MODE_1; s_AT45_Dev.ShiftDir = SPI_SHIFT_MSB;
if(NULL != SPI_DevAdd_s("SPI","SPI_Dev_AT45",&s_AT45_Dev)) { ps_AT45_Dev = &s_AT45_Dev;
if(true == _at45db321_Check_ID()) //校验芯片ID { _at45db321_Binary_Page_Size_512(); s_AT45_InitFlag = true; result = true; } } return result; } |
7. 访问器件
器件装载到装载总线之后,可以通过访问SPI总线实现访问器件,具体就是调用spibus.h提供的API函数SPI_Transfer()。